Control System Design with Python
Introduction to Control Systems Engineering
Control systems engineering is a crucial field that deals with the analysis and design of systems that maintain desired behaviors through feedback mechanisms. Python provides powerful tools for control system analysis and design.
Key Python Libraries
The following libraries are essential for control systems engineering:
numpy- Numerical computations- Efficient array operations
- Linear algebra functions
- Mathematical functions
control- Control systems analysis- Transfer function creation and manipulation
- System analysis tools
- Control design methods
matplotlib- Data visualization- 2D and 3D plotting
- Multiple plot types
- Customizable visualizations
sympy- Symbolic mathematics- Symbolic calculations
- Equation solving
- Laplace transforms
scipy- Scientific computing- Differential equation solvers
- Optimization tools
- Signal processing functions
Python Fundamentals for Control Systems
Basic Python Concepts
Python Syntax Overview
Python's clean and readable syntax makes it ideal for engineering applications:
# Basic variable assignments
x = 123.3
text = "Some text"
flag = True
print(f"x = {x}, text = {text}, flag = {flag}")
# Lists (similar to arrays in other languages)
x = [1, 2, 3, 4]
print("List x:", x)
Output:
NumPy for Numerical Computations
NumPy Arrays and Operations
NumPy provides efficient array operations essential for control systems:
import numpy as np
# Creating arrays
x = np.array([1, 2, 3, 4])
print("NumPy array x:", x)
# Arrays of zeros and ones
x = np.zeros(4)
y = np.ones((2, 2))
print("Array of zeros:", x)
print("2x2 array of ones:\n", y)
# Array operations
a = np.array([1, 2, 3])
b = np.array([4, 5, 6])
print("\nArray operations:")
print("a + b =", a + b)
print("a * b =", a * b)
print("a dot b =", np.dot(a, b))
Output:
Symbolic Mathematics with SymPy
Let's start with basic symbolic operations using a quadratic expression:
Consider the quadratic expression:
In standard form:
Complete square form:
Root:
Basic Symbolic Operations
import sympy as sp
# Define symbolic variable
x = sp.Symbol('x')
# Create and manipulate expressions
expr = x**2 + 2*x + 1
print("Original expression:", expr)
# Solve equation
eq = sp.Eq(expr, 0)
solution = sp.solve(eq, x)
print("\nSolving x^2 + 2x + 1 = 0:")
print("x =", solution)
Output:
For the function:
The derivative is:
The integral is:
Calculus Operations
# Perform calculus operations
derivative = sp.diff(expr, x)
integral = sp.integrate(expr, x)
print("Derivative:", derivative)
print("Integral:", integral)
Output:
Consider the time function:
The Laplace transform is:
Laplace Transforms
# Define time and complex frequency variables
t = sp.Symbol('t')
s = sp.Symbol('s')
# Define time function and compute Laplace transform
f_t = t**2 * sp.exp(-t)
F_s = sp.laplace_transform(f_t, t, s)
print("Time function:", f_t)
print("Laplace transform:", F_s[0])
Output:
Consider the matrix:
Properties:
- Determinant:
- Inverse:
First, compute the adjugate matrix divided by determinant:
Which simplifies to:
Matrix Operations
# Create and manipulate matrices
M = sp.Matrix([[1, 2], [3, 4]])
print("Matrix M:")
print(M)
print("\nDeterminant:", M.det())
print("\nInverse:")
print(M.inv())
Output:
Differential Equations with SciPy
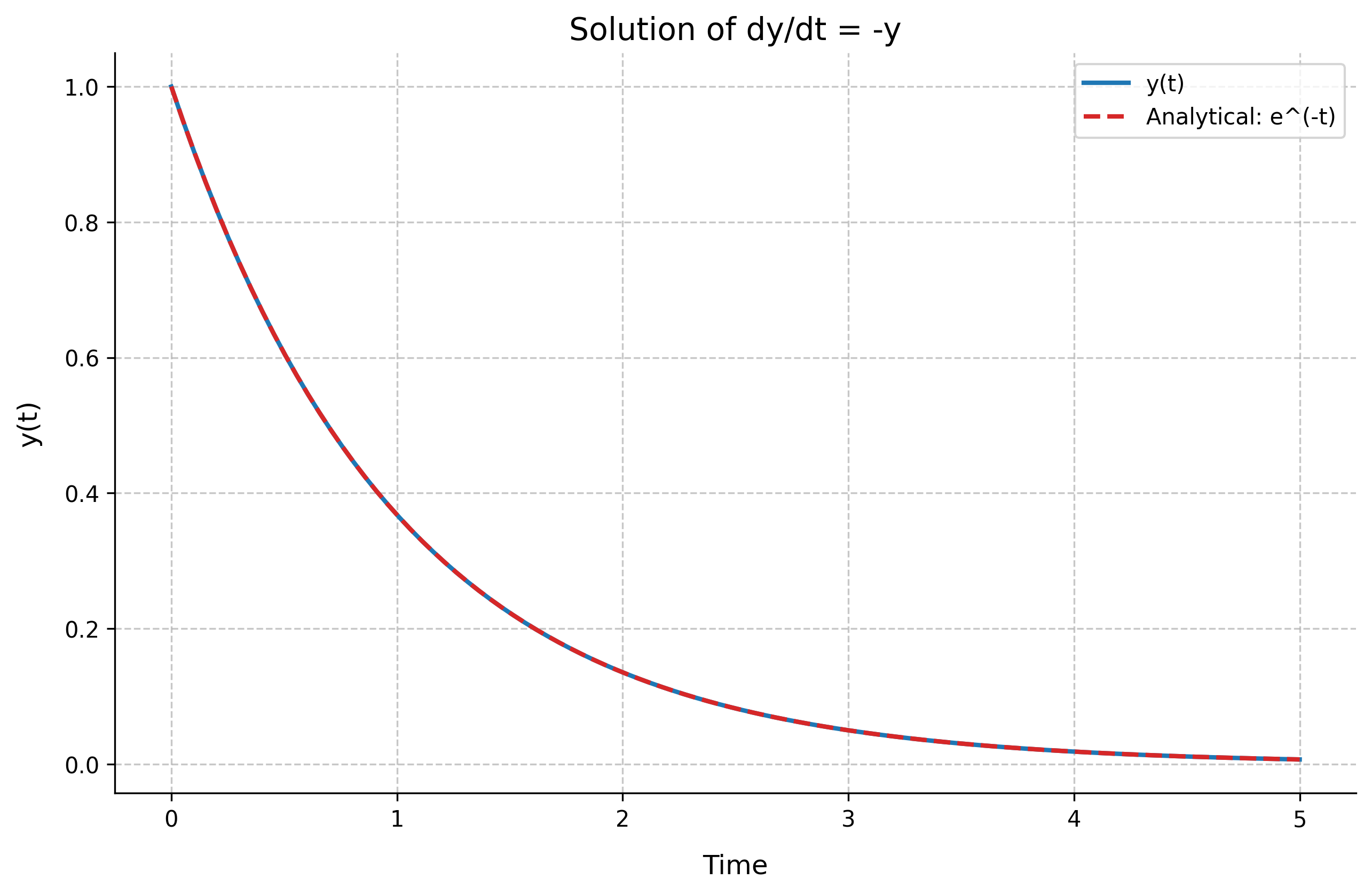
Control systems often involve differential equations. Here's how to solve them:
Consider the first-order differential equation:
With initial condition:
The analytical solution is:
Solving ODEs
import numpy as np
from scipy.integrate import odeint
import matplotlib.pyplot as plt
# Define the differential equation dy/dt = -y
def model(y, t):
return -y
# Time points and initial condition
t = np.linspace(0, 5, 100)
y0 = 1
# Solve ODE
solution = odeint(model, y0, t)
# Plot results
plt.figure(figsize=(10, 6))
plt.plot(t, solution, 'b-', label='y(t)')
plt.plot(t, np.exp(-t), 'r--', label='Analytical: e^(-t)')
plt.grid(True)
plt.xlabel('Time')
plt.ylabel('y(t)')
plt.title('Solution of dy/dt = -y')
plt.legend()
plt.show()
# Print solution values
print("Solution values at t = [0, 1, 2, 3, 4, 5]:")
t_points = [0, 1, 2, 3, 4, 5]
y_points = np.interp(t_points, t, solution.flatten())
for t_val, y_val in zip(t_points, y_points):
print(f"t = {t_val:.1f}, y = {y_val:.4f}")
Output:
Solution values at t = [0, 1, 2, 3, 4, 5]:
t = 0.0, y = 1.0000
t = 1.0, y = 0.3680
t = 2.0, y = 0.1354
t = 3.0, y = 0.0498
t = 4.0, y = 0.0183
t = 5.0, y = 0.0067
Advanced Plotting Techniques
Multiple Plots and Subplots
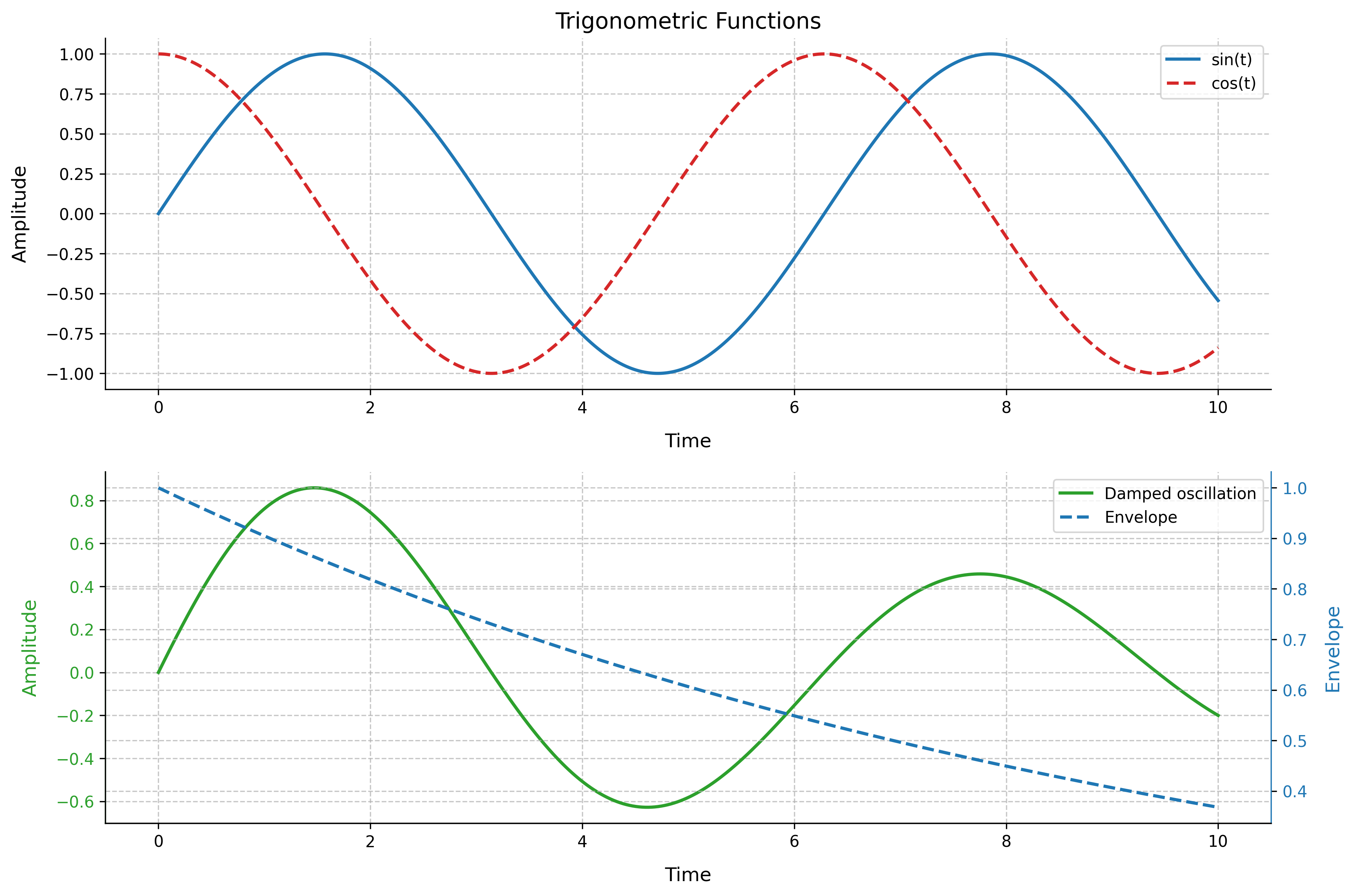
Creating Complex Plots
Control system analysis often requires multiple plots:
import numpy as np
import matplotlib.pyplot as plt
# Generate data
t = np.linspace(0, 10, 1000)
f1 = np.sin(t)
f2 = np.cos(t)
f3 = np.exp(-0.1*t)*np.sin(t)
# Create figure with subplots
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(12, 8))
# First subplot: Multiple functions
ax1.plot(t, f1, 'b-', label='sin(t)')
ax1.plot(t, f2, 'r--', label='cos(t)')
ax1.grid(True)
ax1.set_xlabel('Time')
ax1.set_ylabel('Amplitude')
ax1.set_title('Trigonometric Functions')
ax1.legend()
Data Visualization with Scatter Plots
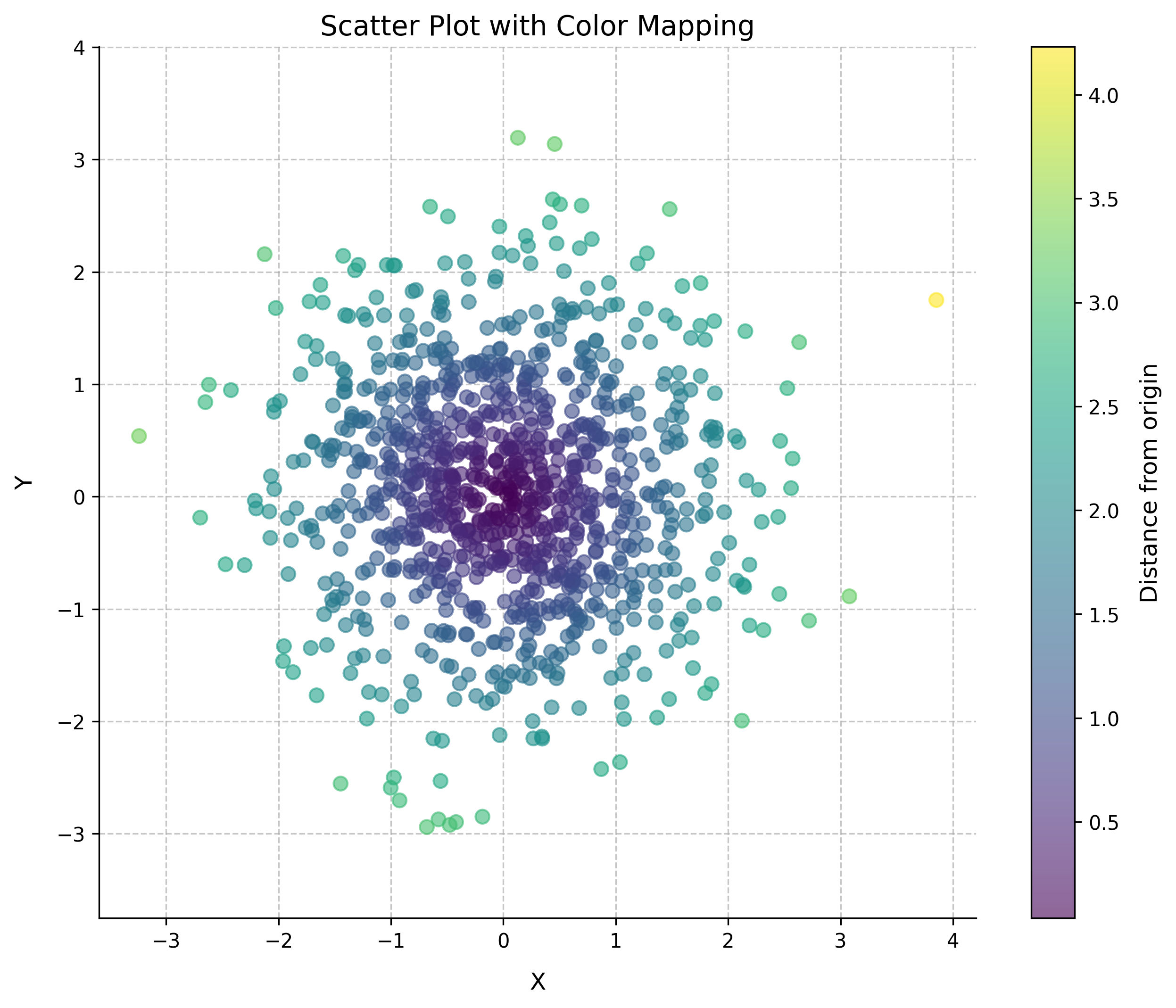
Scatter Plot with Color Mapping
Visualize relationships between variables:
import numpy as np
import matplotlib.pyplot as plt
# Generate random data
np.random.seed(42)
x = np.random.normal(0, 1, 1000)
y = np.random.normal(0, 1, 1000)
z = np.sqrt(x**2 + y**2)
# Create scatter plot
plt.figure(figsize=(10, 8))
scatter = plt.scatter(x, y, c=z, cmap='viridis',
s=50, alpha=0.5)
plt.colorbar(scatter, label='Distance from origin')
plt.grid(True)
plt.xlabel('X')
plt.ylabel('Y')
plt.title('Scatter Plot with Color Mapping')
plt.axis('equal')
plt.show()
Control Systems with Python Control
Transfer Functions and Step Response
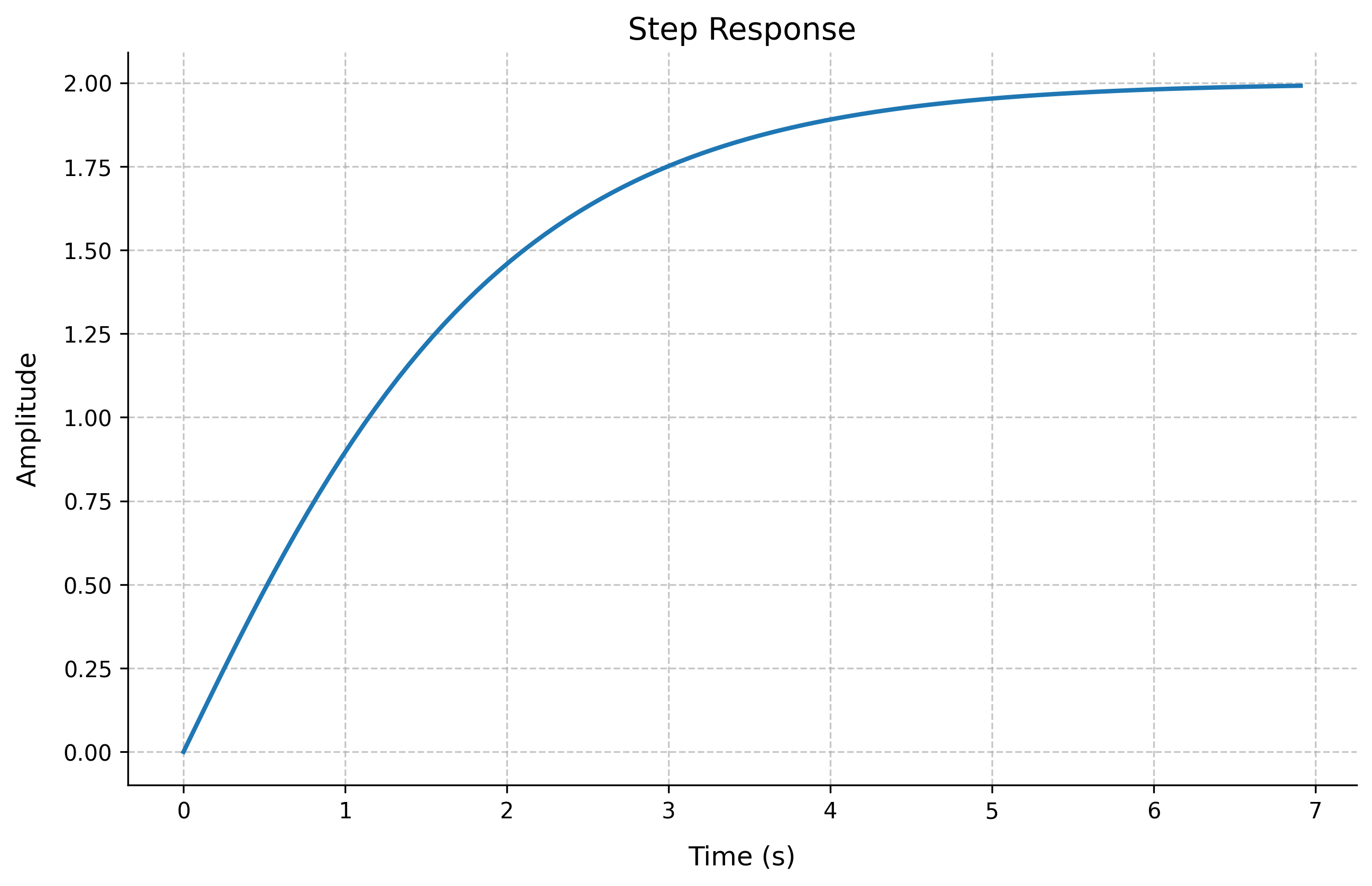
Basic Control System Analysis
The control library provides essential tools:
Consider the transfer function:
import control
import numpy as np
import matplotlib.pyplot as plt
# Create a transfer function G(s) = (s + 2)/(s^2 + 2s + 1)
s = control.TransferFunction.s
G = control.TransferFunction([1, 2], [1, 2, 1])
# Generate and plot step response
t, y = control.step_response(G)
plt.figure(figsize=(10, 6))
plt.plot(t, y, linewidth=2)
plt.grid(True)
plt.title('Step Response')
plt.xlabel('Time (s)')
plt.ylabel('Amplitude')
plt.show()
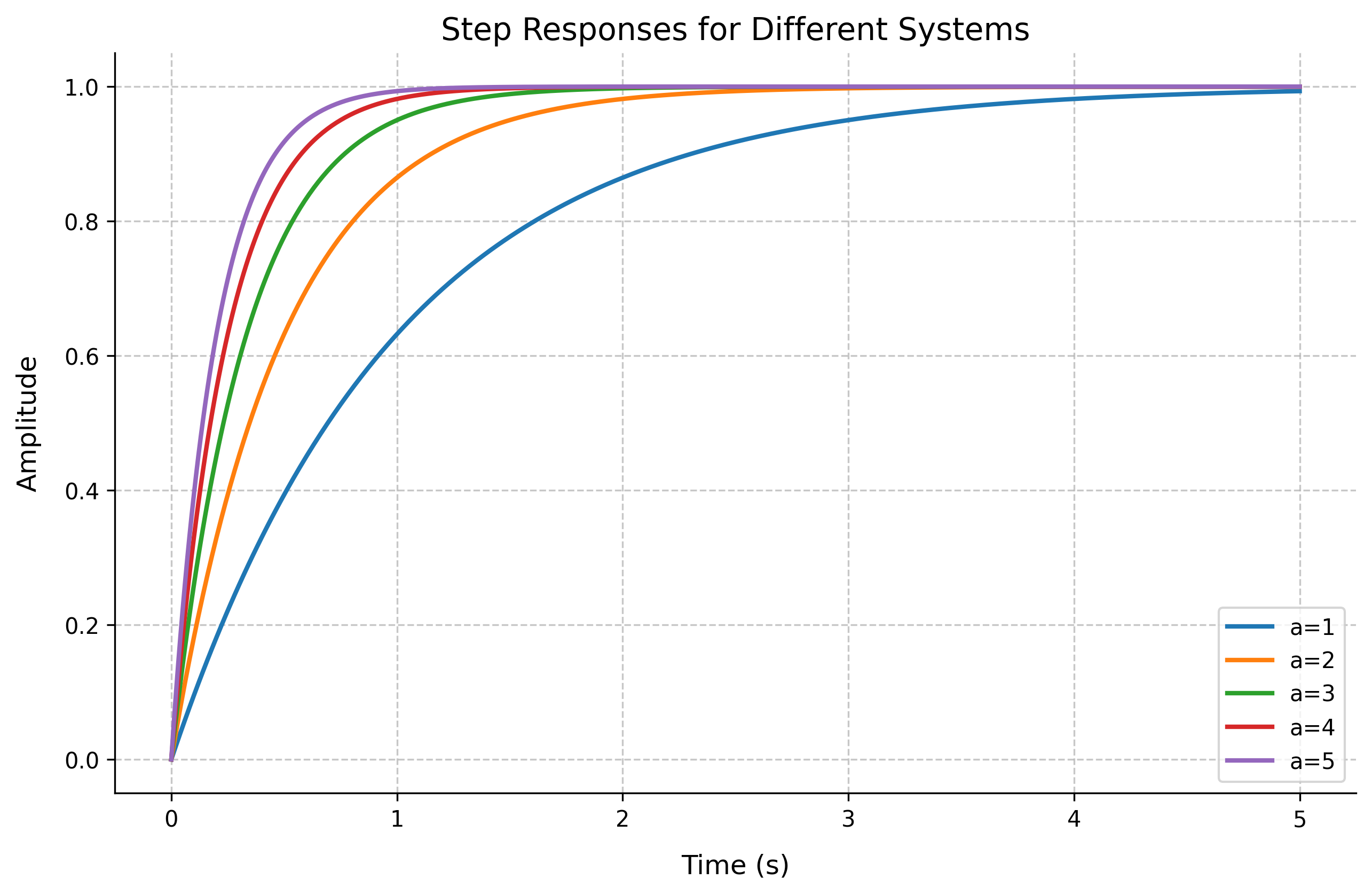
Multiple System Responses
Comparing Different Systems
Compare responses of different transfer functions:
# Create multiple transfer functions
plt.figure(figsize=(10, 6))
t = np.linspace(0, 5, 500)
for a in range(1, 6):
G = control.TransferFunction([a], [1, a])
t, y = control.step_response(G, t)
plt.plot(t, y, linewidth=2, label=f'a={a}')
plt.grid(True)
plt.xlabel('Time (s)')
plt.ylabel('Amplitude')
plt.title('Step Responses for Different Systems')
plt.legend(loc='lower right')
plt.show()
Best Practices
When working with control systems in Python:
- Always use descriptive variable names
- Include proper axis labels and titles
- Add legends when plotting multiple curves
- Use appropriate time scales for system responses
- Document transfer functions and system parameters
- Include grid lines for better readability
- Save high-resolution figures for documentation